|
||
|
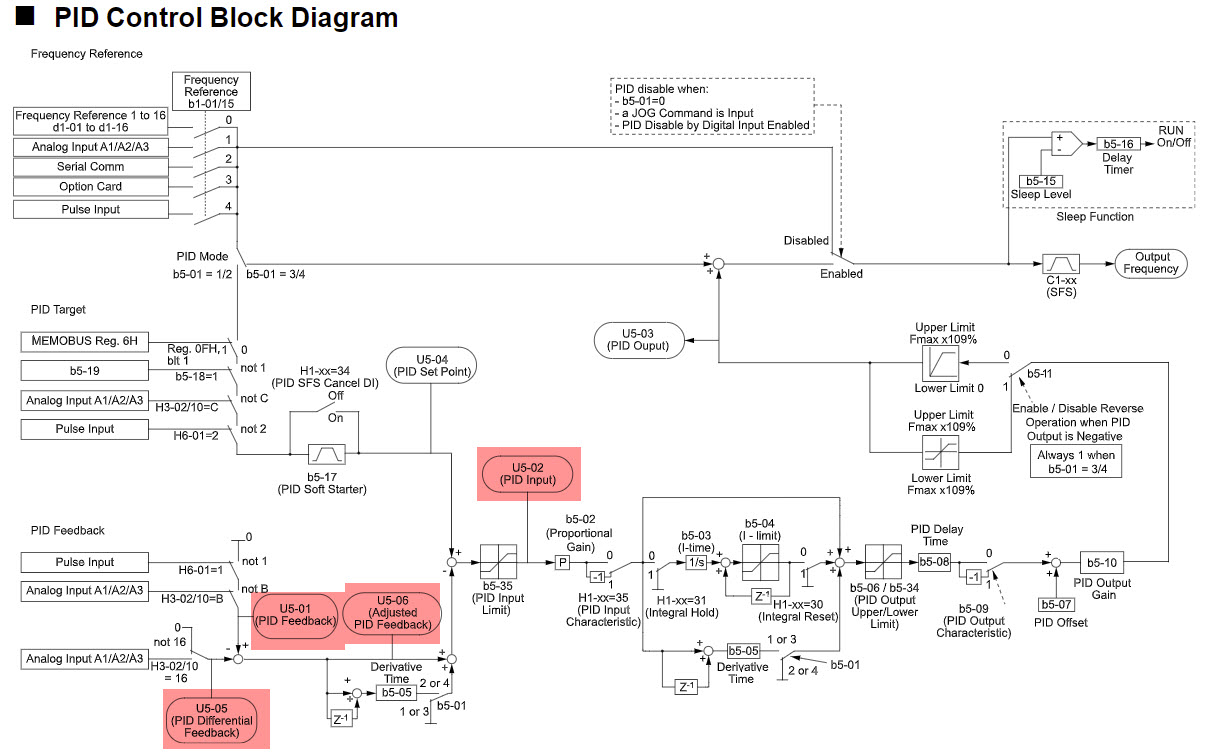
Most Yaskawa drives are capable of differential feedback, which requires two transducers. The drive essentially takes the differential feedback value, which is PID Adjusted Feedback (U5-06), and incorporates it into the PID loop.
This kind of application could be used for buildings that require a certain differential pressure between two rooms, to prevent issues with doors from opening and closing. One transducer would be measuring the static pressure of a room, while the secondary transducer would measure the pressure of an adjacent room. The drive will use the differential feedback value to maintain the desired differential pressure between the two rooms. Note:
|
|
||
|
Use the following steps to setup a PID loop with differential feedback:
|
|
||
| GA800, A1000, A1000 Configured, P1000, P1000 Bypass, P1000 Configured, V1000, V1000-4X, Z1000, Z1000 Configured, |
|
||
| Advanced Random Rotary Knife with Cam Blend, Air Compressor, Blister pack Thermoformer, Cartoner, Centrifuge, Conveyor, Crane/Hoist, Dynamometer, Elevators and Escalators, Extrusion, Fans/Blowers, Feed To Length, General Machinery, HVAC, Irrigation, Labeler, Laundry, Linear Flying Shear, Machine Tool, Mixer, Other, Packaging, Palletizer, Precision Grinding, Pump, Punch Press, Rotary Knife, Rotary Placer, Rotary Table Indexer, Screw Feeder, Semiconductor, Solar Cell Tabbing and Bussing, Solar - Textured Etching, Synch-Belt, Textile, Winding, |
| Last Modified Date: 07-22-2024 |
|
|